Presenting a comprehensive description of the theory and physics of high-intensity ultrasound, this book also deals with a wide range of problems associated with the industrial applications of ultrasound, mainly in the areas of metallurgy and mineral processing. The book is divided into three sections, and Part I introduces the reader to the theory and physics of high-intensity ultrasound. Part II considers the design of ultrasonic generators, mechanoacoustic radiators and other vibrational systems, as well as the control of acoustic parameters when vibrations are passed into a processed medium. Finally, Part III describes problems associated with various uses of high-intensity ultrasound in metallurgy. The applications of high-intensity ultrasound for metal shaping, thermal and thermochemical treatment, welding, cutting, refining, and surface hardening are also discussed here. This comprehensive monograph will provide an invaluable source of information, which has been largely unavailable in the West until now.
Foire aux questions
Comment puis-je résilier mon abonnement ?
Il vous suffit de vous rendre dans la section compte dans paramètres et de cliquer sur « Résilier l’abonnement ». C’est aussi simple que cela ! Une fois que vous aurez résilié votre abonnement, il restera actif pour le reste de la période pour laquelle vous avez payé. Découvrez-en plus ici.
Puis-je / comment puis-je télécharger des livres ?
Pour le moment, tous nos livres en format ePub adaptés aux mobiles peuvent être téléchargés via l’application. La plupart de nos PDF sont également disponibles en téléchargement et les autres seront téléchargeables très prochainement. Découvrez-en plus ici.
Quelle est la différence entre les formules tarifaires ?
Les deux abonnements vous donnent un accès complet à la bibliothèque et à toutes les fonctionnalités de Perlego. Les seules différences sont les tarifs ainsi que la période d’abonnement : avec l’abonnement annuel, vous économiserez environ 30 % par rapport à 12 mois d’abonnement mensuel.
Qu’est-ce que Perlego ?
Nous sommes un service d’abonnement à des ouvrages universitaires en ligne, où vous pouvez accéder à toute une bibliothèque pour un prix inférieur à celui d’un seul livre par mois. Avec plus d’un million de livres sur plus de 1 000 sujets, nous avons ce qu’il vous faut ! Découvrez-en plus ici.
Prenez-vous en charge la synthèse vocale ?
Recherchez le symbole Écouter sur votre prochain livre pour voir si vous pouvez l’écouter. L’outil Écouter lit le texte à haute voix pour vous, en surlignant le passage qui est en cours de lecture. Vous pouvez le mettre sur pause, l’accélérer ou le ralentir. Découvrez-en plus ici.
Est-ce que High-Intensity Ultrasonics est un PDF/ePUB en ligne ?
Oui, vous pouvez accéder à High-Intensity Ultrasonics par O V Abramov en format PDF et/ou ePUB ainsi qu’à d’autres livres populaires dans Technologie et ingénierie et Ingénierie civile. Nous disposons de plus d’un million d’ouvrages à découvrir dans notre catalogue.
An understanding of the specificities of high-power ultrasonic effects on technological processes is possible if the reader has a certain knowledge of engineering sciences and ultrasonics. As the book is primarily for those who are concerned, in one way or another, with material sciences and engineering, it seems reasonable in the first part of the book to introduce the reader to the physical and technical aspects of ultrasonics which is a branch of the wave motion science covering a diversity of phenomena, such as the propagation of elastic waves in water, earth crust, air, electromagnetic waves of a radio-frequency range, light waves, etc.
The first part of the book deals with the problems that will be considered to some extent in its subsequent parts. These involve the basic principles of ultrasonics: the regularities of vibrational motion and propagation of low- and finite-amplitude waves in fluids and solids, as well as nonlinear effects at interfaces.
Chapter 1
Low-Amplitude Vibrations and Waves
This chapter gives a brief description of the regularities of oscillatory and wave motion as well as the principles of the propagation of low-amplitude waves in fluids and solids.
The fundamentals of classical acoustics were formulated in the works of G. Galilei, M. Mersenne, L. Euler, V. Weber, and G. Helmholtz. The book by J. Rayleigh “Theory of sound” [1] completes the main stage of development of classical acoustics. For a more detailed information on acoustic fundamentals, the reader is referred to [2–10].
1.1 Harmonic Oscillator
Vibrations, or periodical reciprocating motion, is a widespread form of motion. Mechanical oscillations (e.g. of a pendulum, tuning fork, etc.) can be considered as repetitive alterations of position and velocity of a body or its parts. A change in the current and voltage in a circuit or movement of electrons in atoms, as well as other relevant processes, may give rise to electrical oscillations. Although different, various oscillations obey the same laws and can be described by the same equations.
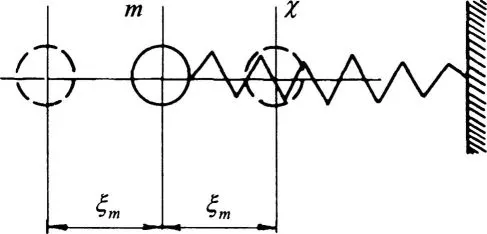
Among a diversity of oscillations, those of a linear harmonic oscillator are considered to be simplest (Figure 1.1).
If mass m is disturbed from equilibrium by stretching or compressing a spring and then letting it free, the mass begins to oscillate around its equilibrium position*. Such oscillations are known as free or natural, as opposed to forced oscillations, when the system is subject to external force. Oscillations would not be damped if energy loss is absent, i.e. if the system is conservative. Let us consider the simplest case of undamped natural oscillations, which makes it possible to elucidate on the contribution from various parameters of real systems to the oscillatory process.
Figure 1.1. Vibrations in the simplest mechanical system.
The system under study is acted upon by two forces, inertial Fi and elastic Fe. The law of motion can be written as
According to the force law
where ξ is the displacement, d2ξ/dt2 is the acceleration equal to the second derivative of displacement with respect to time t.
For an ideal spring, the elastic force Fe counteracting the extension is given by
where χ the coefficient of elasticity which is equal to the ratio of the acting force to the mass displacement (i.e. to the extension or compression of the spring).
In view of (1.2a) and (1.2b), the equation of motion (1.1) can be rewritten as
For integration, this equation can be conveniently written in the so-called canonical form
where is the angular (circular) frequency of natural oscillations of the system.
In practice, the frequency f0 is also used, which equals the number of oscillations per unit time and is related to the angular frequency and oscillation period T0 as
The general solution to equation (1.3b) has the form
where A = ξm cos θ; B = −ξm sin θ; ξm is the amplitude of oscillations (i.e. the maximum displacement of the mass from its eq...