![]()
1
Introduction to Kinematics
CONCEPT OVERVIEW
In this chapter, the reader will gain a central understanding regarding
Kinematics and its use in engineering design
Distinctions between kinematic chains and mechanisms
Planar and spatial mechanism mobility
Types of mechanism motion
Distinctions between kinematic analysis and kinematic synthesis
Categories of kinematic synthesis
1.1 Kinematics
Kinematics is the study of motion without considering forces. In a kinematic analysis, positions, displacements, velocities and accelerations are calculated for mechanical system components without regard to the loads that actually govern them. In comparison to other engineering design studies such as statics, where motion and governing loads are considered according to Newton’s first law, and dynamics, where motion and governing loads are considered according to Newton’s second law, kinematics is the most fundamental engineering design study. It is often necessary in the design of a mechanical system to not only consider the motion of its components, but also the following:
Static or dynamic loads acting on the components (considered in statics and dynamics)
Component material stress and strain responses to the loads (considered in stress analysis)
Required component dimensions for the working stresses (considered in machine design)
Because of this, static, dynamic, stress, and machine design analyses often follow a kinematic analysis.
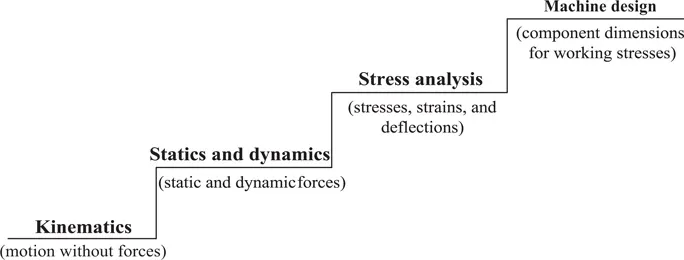
Figure 1.1 includes kinematics, statics and dynamics, stress analysis and machine design in an ascending order of progression. This order follows the intended order of use of these studies in mechanical design. After a mechanical system has first been determined to be kinematically feasible, the static or dynamic loads acting on the system components are considered next. After static or dynamic feasibility has been achieved, the stresses and strains produced in the mechanical system components are then considered. Lastly, machine design principles and methodologies are employed to ensure the material and dimensions of the mechanical system components (and subsequently the entire mechanical system) are satisfactory for the known working stresses.*
FIGURE 1.1
Kinematics in relation to other associated engineering design studies.
As illustrated in Figure 1.1, kinematics is the most fundamental of the engineering design study listed. When a design is not kinematically sound, evidence of this will often appear in the other engineering design studies. For example, a discontinuous displacement profile calculated in a kinematic analysis would be revealed as excessive acceleration in a dynamic analysis, which, in turn, could produce excessive dynamic forces. These excessive dynamic forces would likely produce high stresses. These high stresses may require a material selection or component dimensions that make the overall component design impractical for the intended design application. Kinematic feasibility, therefore, must be established first before considering the follow-on engineering design studies in Figure 1.1.
1.2 Kinematic Chains and Mechanisms
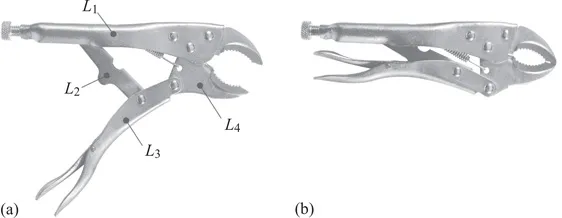
This textbook focuses primarily on the kinematic analysis and kinematic synthesis of mechanical systems or mechanisms, as they are commonly called.† A kinematic chain, an overarching classification that includes mechanisms, is an assembly of links interconnected by joints where the motion of one link compels the motion of another link (which compels the motion of another link, and so on depending on the number of mechanism links).‡ Complex mechanical systems, such as an automobile engine, for example, can be comprised of multiple kinematic chains, while a single kinematic chain can constitute an entire mechanical system in the case of a simple tool. Figure 1.2 illustrates a commonly used kinematic chain: a pair of pliers. Moving the lower handle (link L3) toward the upper handle (link L1) or vice versa compels the motion of the remaining links, including the lower grip (link L4), which produces a gripping action. Having links compel the motion of each other link in a controlled manner is important because the fundamental objective in the design of a mechanical system is to provide a controlled output motion in response to a supplied input motion.
FIGURE 1.2
Pliers in (a) open and (b) closed positions.
One characteristic that distinguishes mechanisms from other kinematic chains is that the former has at least one “grounded” link [1]. A grounded link is one that is attached to a particular frame of reference. Some mechanisms have links that are permanently grounded through friction, gravity, or fastening members (e.g., bolts, screws, and welds), whereas with our pliers example, the grounded link can be established according to one’s own preferences.
1.3 Mobility, Planar, and Spatial Mechanisms
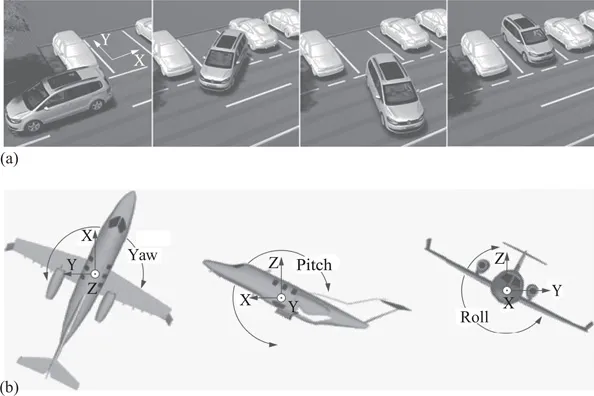
The mobility or the number of degrees of freedom of a mechanism is the number of independent parameters required to uniquely define its position in space. Knowing the mobility of a mechanism is particularly important when formulating equation systems for the kinematic analysis or synthesis of the mechanism. This is because the equation systems must include enough parameters to fully define the motion of each mechanism component. To fully define the position of a body in two-dimensional or planar space at an instant in time requires three independent parameters. To demonstrate this principle, we will consider the parking automobile example in Figure 1.3a where the X-Y coordinate frame is affixed to the parking space. At any instant in time, the position of the automobile can be measured with respect to the X-Y coordinate frame given three independent parameters. The X and Y coordinates of any point on the automobile are two of the three parameters required to define the planar position of a body. Because the parking automobile also rotates in the coordinate frame, its angular position is also required to fully define its position in the X-Y coordinate frame. Therefore, the three parameters required to define a planar position are the X and Y coordinates of a location on the body and the orientation angle of the body. Because three independent parameters are required to define the position of the body in the X-Y plane, an individual mechanism link restricted to planar motion can have a mobility of up to three or up to three degrees of freedom.
FIGURE 1.3
(a) Parking automobile and (b) aircraft in flight.
To fully define the position of a body in three-dimensional space at an instant in time requires six independent parameters. To demonstrate this principle, we will consider the flying aircraft example in Figure 1.3b where the X-Y-Z coordinate frame is affixed in space. At any instant in time, the position of the aircraft can be measured with respect to the X-Y-Z coordinate frame given six independent parameters. The X, Y, and Z coordinates of any point on the aircraft are three of the six parameters required to define the spatial position of a body. Because the aircraft also rotates about each coordinate frame axis, these three angular positions are also required to fully define its position in the X-Y-Z coordinate frame.* Therefore, the six parameters required to define a spatial position are the X, Y, and Z coordinates of a location on the body and the orientation angles of the body about the X, Y, and Z axes. Because six independent parameters are required to define the position of the body in X-Y-Z space, an individual mechanism link restricted to spatial motion can have a mobility of up to six, or up to six degrees of freedom.
Figure 1.4a illustrates a pai...