![]()
Chapter 1
Introduction
1.1 Feedback Control Systems
Examples of feedback are found in many disciplines such as engineering, biological sciences, business, and economy. In a feedback system there is a process (a cause-effect relation) whose operation depends on one or more variables (inputs) that cause changes in some other variables. If an input variable can be manipulated, it is said to be a control input, otherwise it is considered a disturbance (or noise) input. Some of the process variables are monitored; these are the outputs. The feedback controller gathers information about the process behavior by observing the outputs, and then it generates the new control inputs in trying to make the system behave as desired. Decisions taken by the controller are crucial; in some situations they may lead to a catastrophe instead of an improvement in the system behavior. This is the main reason that feedback controller design (i.e., determining the rules for automatic decisions taken by the feedback controller) is an important topic.
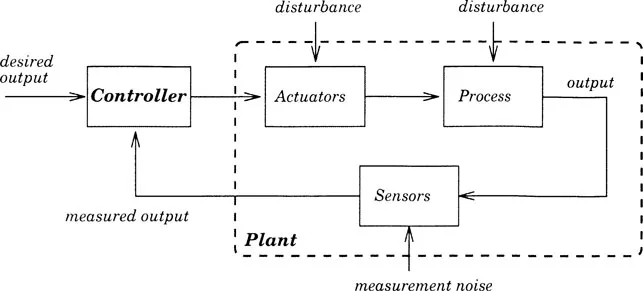
A typical feedback control system consists of four subsystems: a process to be controlled, sets of sensors and actuators, and a controller, as shown in Figure 1.1. The process is the actual physical system that cannot be modified. Actuators and sensors are selected by process engineers based on physical and economical constraints (i.e., the range of signals to be measured and/or generated and accuracy versus cost of these devices). The controller is to be designed for a given plant (the overall system, which includes the process, sensors, and actuators).
Figure 1.1: Feedback control system.
In engineering applications the controller is usually a computer, or a human operator interfacing with a computer. Biological systems can be more complex; for example, the central nervous system is a very complicated controller for the human body. Feedback control systems encountered in business and economy may involve teams of humans as main decision makers, e.g., managers, bureaucrats, and/or politicians.
A good understanding of the process behavior (i.e., the cause-effect relationship between input and output variables) is extremely helpful in designing the rules for control actions to be taken. Many engineering systems are described accurately by the physical laws of nature. So, mathematical models used in engineering applications contain relatively low levels of uncertainty, compared with mathematical models that appear in other disciplines, where input-output relationships can be much more complicated.
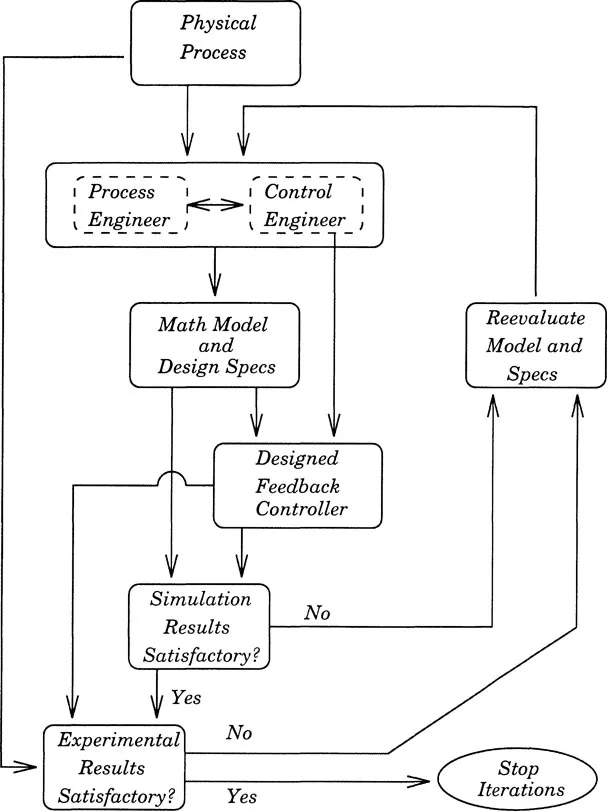
In this book, certain fundamental problems of feedback control theory are studied. Typical application areas in mind are in engineering. It is assumed that there is a mathematical model describing the dynamical behavior of the underlying process (modeling uncertainties will also be taken into account). Most of the discussion is restricted to single input-single output (SISO) processes. An important point to keep in mind is that success of the feedback control depends heavily on the accuracy of the process/uncertainty model, whether this model captures the reality or not. Therefore, the first step in control is to derive a simple and relatively accurate mathematical model of the underlying process. For this purpose, control engineers must communicate with process engineers who know the physics of the system to be controlled. Once a mathematical model is obtained and performance objectives are specified, control engineers use certain design techniques to synthesize a feedback controller. Of course, this controller must be tested by simulations and experiments to verify that performance objectives are met. If the achieved performance is not satisfactory, then the process model and the design goals must be reevaluated and a new controller should be designed from the new model and the new performance objectives. This iteration should continue until satisfactory results are obtained, see Figure 1.2.
Modeling is a crucial step in the controller design iterations. The result of this step is a nominal process model and an uncertainty description that represents our confidence level for the nominal model. Usually, the uncertainty magnitude can be decreased, i.e., the confidence level can be increased only by making the nominal plant model description more complicated (e.g., increasing the number of variables and equations). On the other hand, controller design and analysis for very complicated process models are very difficult. This is the basic trade-off in system modeling. A useful nominal process model should be simple enough so that the controller design is feasible. At the same time the associated uncertainty level should be low enough to allow the performance analysis (simulations and experiments) to yield acceptable results.
Figure 1.2: Controller design iterations.
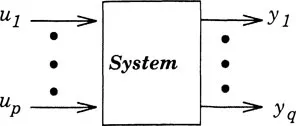
Figure 1.3: A MIMO system.
The purpose of this book is to present basic feedback controller design and analysis (performance evaluation) techniques for simple SISO process models and associated uncertainty descriptions. Examples from certain specific engineering applications will be given whenever it is necessary. Otherwise, we will just consider generic mathematical models that appear in many different application areas.
1.2 Mathematical Models
A multi-input-multi-output (MIMO) system can be represented as shown in Figure 1.3, where u1,…, up are the inputs and y1,…, yq are the outputs (for SISO systems we have p = q = 1). In this figure, the direction of the arrows indicates that the inputs are processed by the system to generate the outputs.
In general, feedback control theory deals with dynamical systems, i.e., systems with internal memory (in the sense that the output at time t = t0 depends on the inputs applied at time instants t ≤ t0). So, the plant models are usually in the form of a set of differential equations obtained from physical laws of nature. Depending on the operating conditions, input/output relation can be best described by linear or nonlinear, partial or ordinary differential equations.
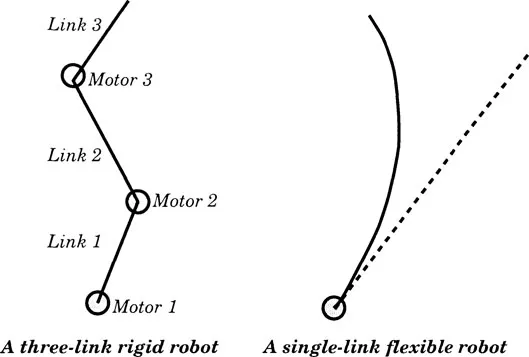
Figure 1.4: Rigid and flexible robots.
For example, consider a three-link robot as shown in Figure 1.4. This system can also be seen as a simple model of the human body. Three motors located at the joints generate torques that move the three links. Position, and/or velocity, and/or acceleration of each link can be measured by sensors (e.g., optical light with a camera, or gyroscope). Then, this information can be processed by a feedback controller to produce the rotor currents that generate the torques. The feedback loop is hence closed. For a successful controller design, we need to understand (i.e., derive mathematical equations of) how torques affect position and velocity of each link, and how current inputs to motors generate torque, as well as the sensor behavior. The relationship between torque and position/velocity can be determined by laws of physics (Newton’s law). If the links are rigid, then a set of nonlinear ordinary differential equations is obtained, see [26] for a mathematical model. If the analysis and design are restricted to small displacements around the upright equilibrium, then equations can be linearized without introducing too much error [29]. If the links are made of a flexible material (for example, in space applications the weight of the material must be minimized to reduce the payload, which forces the use of lightweight flexible materials), then we must consider bending effects of the links, see Figure 1.4. In this case, there are an infinite number of position coordinates, and partial differential equations best describe the overall system behavior [30, 46].
The robotic examples given here show that a mathematical model can be linear or nonlinear, finite dimensional (as in the rigid robot case) or infinite dimensional (as in the flexible robot case). If the parameters of the system (e.g., mass and length of the links, motor coefficients, etc.) do not change with time, then these models are time-invariant, otherwise they are time-varying.
In this book, linear time-invariant (LTI) models will be considered only. Most of the discussion will be restricted to finite dimensional models, but certain simple infinite dimensional models (in particular time delay systems) will also be discussed.
The book is organized as follows. In Chapter 2, modeling issues and sources of uncertainty are studied and the main reason to use feedback is explained. Typical performance objectives are defined in Chapter 3. In Chapter 4, basic stability tests are given. Single parameter controller design is covered in Chapter 5 by using the root locus technique. Stability robustness and stability margins are defined in Chapter 6 via Nyquist plots. Stability analysis for systems with time delays is in Chapter 7. Simple lead-lag and PID controller design methods are discussed in Chapter 8. Loopshaping ideas are introduced in Chapter 9. In Chapter 10, robust stability and performance conditions are defined and an controller design procedure is outlined. Finally, state space based controller design methods are briefly discussed and a parameterization of all stabilizing controllers is presented in Chapter 11.
![]()
Chapter 2
Modeling, Uncertainty, and Feedback
2.1 Finite Dimensional LTI System Models
Throughout the book, linear time-invariant (LTI) single input-single output (SISO) plant models...