This introduction to linear algebra and functional analysis offers a clear expository treatment, viewing algebra, geometry, and analysis as parts of an integrated whole rather than separate subjects. All abstract ideas receive a high degree of motivation, and numerous examples illustrate many different fields of mathematics. Abundant problems include hints or answers.
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
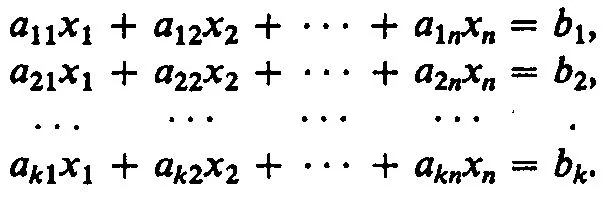
In this and the next two chapters, we shall study systems of linear equations. In the most general case, such a system has the form
(1)
Here x1, x2, . . . , xn denote the unknowns which are to be determined. (Note that we do not necessarily assume that the number of unknowns equals the number of equations.) The quantities a11, a12, . . . , akn are called the coefficients of the system. The first index of a coefficient indicates the number of the equation in which the coefficient appears, while the second index indicates the number of the unknown with which the coefficient is associated.1 The quantities b1, b2, . . . , bk appearing in the right-hand side of (1) are called the constant terms of the system; like the coefficients, they are assumed to be known. By a solution of the system (1) we mean any set of numbers c1, c2, . . . , cn which when substituted for the unknowns x1, x2, . . . , xn, turns all the equations of the system into identities.2
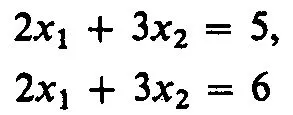
Not every system of linear equations of the form (1) has a solution. For example, the system
(2)
obviously has no solution at all. Indeed, whatever numbers c1, c2 we substitute in place of the unknowns x1, x2, the left-hand sides of the equations of the system (2) are the same, while the right-hand sides are different. Therefore, no such substitution can simultaneously convert both equations of the system into identities.
A system of equations of the form (1) which has at least one solution is called compatible; a system which does not have solutions is called incompatible. A compatible system can have one solution or several solutions. In the latter case, we distinguish the solutions by indicating the number of the solution by a superscript in parentheses; for example, the first solution will be denoted by
,
, . . . ,
, the second solution by
,
, . . . ,
, and so on. The solutions
,
, . . . ,
and
,
, . . . ,
are considered to be distinct if at least one of the numbers
does not coincide with the corresponding numbers
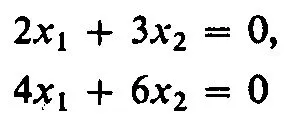
(i = 1, 2, ..., n). For example, the system
(3)
has the distinct solutions
(and also infinitely many other solutions). If a compatible system has a unique solution, the system is called determinate; if a compatible system has at least two different solutions, it is called indeterminate.
We can now formulate the basic problems which arise in studying the system (1):
To ascertain whether the system (1) is compatible or incompatible;
If the system (1) is compatible, to ascertain whether it is determinate;
If the system (1) is compatible and determinate, to find its unique solution;
If the system (1) is compatible and indeterminate, to describe the set of all its solutions.
Th...
Table of contents
DOVER BOOKS ON MATHEMATICS
Title Page
Copyright Page
AUTHOR’S PREFACE
TRANSLATOR’S PREFACE
Table of Contents
1 - DETERMINANTS
2 - LINEAR SPACES
3 - SYSTEMS OF LINEAR EQUATIONS
4 - LINEAR FUNCTIONS OF A VECTOR ARGUMENT
5 - COORDINATE TRANSFORMATIONS
6 - BILINEAR AND QUADRATIC FORMS
7 - EUCLIDEAN SPACES
8 - ORTHOGONALIZATION AND THE MEASUREMENT OF VOLUME
9 - INVARIANT SUBSPACES AND EIGENVECTORS
10 - QUADRATIC FORMS IN A EUCLIDEAN SPACE
11 - QUADRIC SURFACES
12 - INFINITE-DIMENSIONAL EUCLIDEAN SPACES
BIBLIOGRAPHY
INDEX
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access An Introduction to the Theory of Linear Spaces by Georgi E. Shilov,Richard A. Silverman, Richard A. Silverman in PDF and/or ePUB format, as well as other popular books in Mathematics & Linear Algebra. We have over 1.5 million books available in our catalogue for you to explore.