This introduction to linear algebra and functional analysis offers a clear expository treatment, viewing algebra, geometry, and analysis as parts of an integrated whole rather than separate subjects. All abstract ideas receive a high degree of motivation, and numerous examples illustrate many different fields of mathematics. Abundant problems include hints or answers.
Foire aux questions
Comment puis-je résilier mon abonnement ?
Il vous suffit de vous rendre dans la section compte dans paramètres et de cliquer sur « Résilier l’abonnement ». C’est aussi simple que cela ! Une fois que vous aurez résilié votre abonnement, il restera actif pour le reste de la période pour laquelle vous avez payé. Découvrez-en plus ici.
Puis-je / comment puis-je télécharger des livres ?
Pour le moment, tous nos livres en format ePub adaptés aux mobiles peuvent être téléchargés via l’application. La plupart de nos PDF sont également disponibles en téléchargement et les autres seront téléchargeables très prochainement. Découvrez-en plus ici.
Quelle est la différence entre les formules tarifaires ?
Les deux abonnements vous donnent un accès complet à la bibliothèque et à toutes les fonctionnalités de Perlego. Les seules différences sont les tarifs ainsi que la période d’abonnement : avec l’abonnement annuel, vous économiserez environ 30 % par rapport à 12 mois d’abonnement mensuel.
Qu’est-ce que Perlego ?
Nous sommes un service d’abonnement à des ouvrages universitaires en ligne, où vous pouvez accéder à toute une bibliothèque pour un prix inférieur à celui d’un seul livre par mois. Avec plus d’un million de livres sur plus de 1 000 sujets, nous avons ce qu’il vous faut ! Découvrez-en plus ici.
Prenez-vous en charge la synthèse vocale ?
Recherchez le symbole Écouter sur votre prochain livre pour voir si vous pouvez l’écouter. L’outil Écouter lit le texte à haute voix pour vous, en surlignant le passage qui est en cours de lecture. Vous pouvez le mettre sur pause, l’accélérer ou le ralentir. Découvrez-en plus ici.
Est-ce que An Introduction to the Theory of Linear Spaces est un PDF/ePUB en ligne ?
Oui, vous pouvez accéder à An Introduction to the Theory of Linear Spaces par Georgi E. Shilov, Richard A. Silverman en format PDF et/ou ePUB ainsi qu’à d’autres livres populaires dans Mathematics et Linear Algebra. Nous disposons de plus d’un million d’ouvrages à découvrir dans notre catalogue.
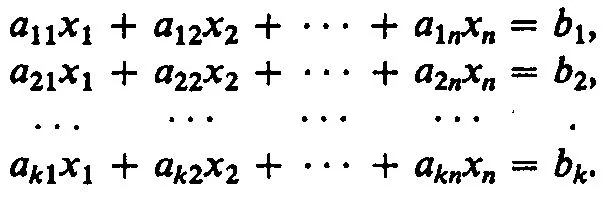
In this and the next two chapters, we shall study systems of linear equations. In the most general case, such a system has the form
(1)
Here x1, x2, . . . , xn denote the unknowns which are to be determined. (Note that we do not necessarily assume that the number of unknowns equals the number of equations.) The quantities a11, a12, . . . , akn are called the coefficients of the system. The first index of a coefficient indicates the number of the equation in which the coefficient appears, while the second index indicates the number of the unknown with which the coefficient is associated.1 The quantities b1, b2, . . . , bk appearing in the right-hand side of (1) are called the constant terms of the system; like the coefficients, they are assumed to be known. By a solution of the system (1) we mean any set of numbers c1, c2, . . . , cn which when substituted for the unknowns x1, x2, . . . , xn, turns all the equations of the system into identities.2
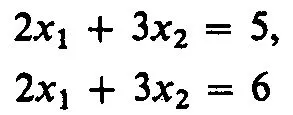
Not every system of linear equations of the form (1) has a solution. For example, the system
(2)
obviously has no solution at all. Indeed, whatever numbers c1, c2 we substitute in place of the unknowns x1, x2, the left-hand sides of the equations of the system (2) are the same, while the right-hand sides are different. Therefore, no such substitution can simultaneously convert both equations of the system into identities.
A system of equations of the form (1) which has at least one solution is called compatible; a system which does not have solutions is called incompatible. A compatible system can have one solution or several solutions. In the latter case, we distinguish the solutions by indicating the number of the solution by a superscript in parentheses; for example, the first solution will be denoted by
,
, . . . ,
, the second solution by
,
, . . . ,
, and so on. The solutions
,
, . . . ,
and
,
, . . . ,
are considered to be distinct if at least one of the numbers
does not coincide with the corresponding numbers
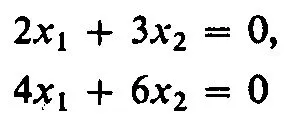
(i = 1, 2, ..., n). For example, the system
(3)
has the distinct solutions
(and also infinitely many other solutions). If a compatible system has a unique solution, the system is called determinate; if a compatible system has at least two different solutions, it is called indeterminate.
We can now formulate the basic problems which arise in studying the system (1):
To ascertain whether the system (1) is compatible or incompatible;
If the system (1) is compatible, to ascertain whether it is determinate;
If the system (1) is compatible and determinate, to find its unique solution;
If the system (1) is compatible and indeterminate, to describe the set of all its solutions.