Correct application of the principles of biomechanics leads to highly efficient and successful orthodontic treatment; a lack of proper understanding produces ineffectual systems that may even lead to collateral tissue damage. In addition, knowledge about the properties of the latest wire, bracket, and bonding materials and designs is a key factor in the configuration of successful orthodontic appliances. This essential book introduces students of orthodontics to the evolution of orthodontic technology and the properties of orthodontic materials and outlines the essential mechanical principles behind successful orthodontic treatment.
- 168 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information

Physical Principles
Movement of teeth in orthodontic treatment requires application of forces and periodontal tissue response to these forces. Force mechanics are governed by physical principles, such as the laws of Newton and Hooke. This chapter presents the basic definitions, concepts, and applicable mechanical principles of tooth movement, laying the groundwork for subsequent chapters.
Newton’s Laws
Isaac Newton’s (1642–1727) three laws of motion, which analyze the relations between the effective forces on objects and their movements, are all applicable to clinical orthodontics.
The law of inertia
The law of inertia analyzes the static balance of objects. Every body in a state of rest or uniform motion in a straight line will continue in the same state unless it is compelled to change by the forces applied to it.
The law of acceleration
The law of acceleration states that the change in motion is proportional to the motive force that is applied. Acceleration occurs in the direction of the straight line in which the force is applied: a = F/m, where a = acceleration, F = force, and m = mass.
The law of action and reaction
The reaction of two objects toward each other is always equal and in an opposite direction. Therefore, to every action there is always an equal and opposite reaction.
Vectors
When any two points in space are joined, a line of action is created between these points. When there is movement from one of these points toward the other, a direction is defined. The magnitude of this force is called a vector, it is shown by the length of an arrow, and its point of application is shown with a point. For example, in Fig 1-1, the line of action of the force vector, which is applied by the labial arch of a removable appliance on the labial surface of the crown of the incisor, is horizontal. The direction is backward (ie, from anterior to posterior), and its amount is signified by the length of the arrow.
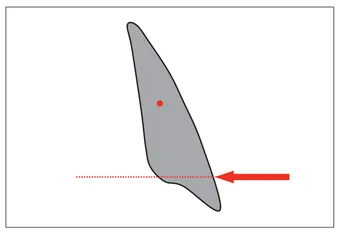
Fig 1-1 Force is a vector. The force applied to the incisor is signified by the length of the arrow, and the point of application is on the crown. Its line of action is horizontal, and its direction is from anterior to posterior.
Addition of vectors
Vectors are defined in a coordinate system. The use of two coordinate axes can be sufficient for vectors on the same plane.
In Fig 1-2a, the resultant (R) of the vectors of different forces (x and y), which are on the same line of action and in the same direction, equals the algebraic sum of these two vectors (x + y). The resultant of two vectors on the same line of action but in opposite directions can be calculated as (x + [–y]) (Fig 1-2b).
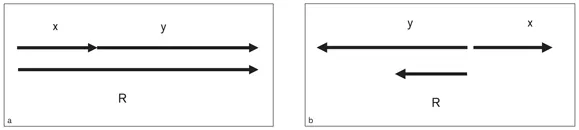
Fig 1-2 The resultant (R) of forces (x and y) on the same line of action and direction is R = x + y (a) and the same line of action but in different directions is R = x + (–y) (b).
The resultant of two vectors that have a common point of origin is the diagonal of a parallelogram whose sides are the two vectors (Fig 1-3a). The resultant of the same vectors can also be obtained by joining the tip of a vector parallel to vector y drawn from the tip of vector x to the point of origin of vector x (Fig 1-3b).
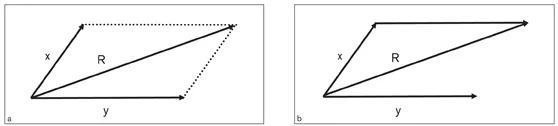
Fig 1-3 (a) The resultant (R) of the x and y vectors that have the same point of origin is the diagonal of the parallelogram with these vectors used as the sides. (b) R can also be obtained by drawing a vector parallel to vector y and extending from the tip of vector x, then drawing a line joining its tip to the origin of vector x.
Sum of multiple vectors
The sum of multiple vectors is calculated in the same system as the calculation of two vectors. Therefore, the third vector is added to the resultant of the first two vectors, and so on (Fig 1-4).
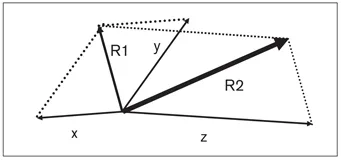
Fig 1-4 To find the sum of multiple vectors having the same point of origin, first draw the resultant (R1) of vectors x and y, thus defining the resultant (R2) of the z and R1 vectors (ie, x + y = R1; z + R1 = R2).
Subtraction of two vectors
To define the difference between two vectors, a new vector (–y) is drawn in the opposite direction from the tip of vector x and parallel to vector y, and the point of origin of vector x is joined to the tip of vector –y (Fig 1-5). Thus, the resultant (R) is from the point of origin of vectors x and y toward the tip of vector –y.
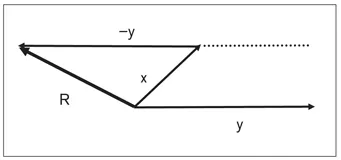
Fig 1-5 The difference between x and y vectors having the same point of origin can be obtained by drawing a vector (–y) starting from the tip of vector x that runs parallel to the y vector but in the opposite direction; then the tip of vector –y is joined to the point of origin of vectors x and y.
Separating a vector into components
To separate a resultant vector (R) into components, two parallel lines are drawn from the point of origin of that vector toward the components that are searched. By drawing parallels from the R vector’s tip toward these lines, a parallelogram is obtained. The sum of the two components obtained by this method is exactly equal to vector R.
The separation of a resultant vector into components is generally (at the elementary level) realized on x and y reference axes for ease of presentation and trigonometric calculations (Fig 1-6). In fact, for complicated calculations, vectors can be separated into unnumbered directions. Therefore, the x-axis is generally accepted as the horizontal axis, and the y-axis is accepted as the vertical axis. Thus, the component x of vector R can be defined as horizontal and the component y as vertical.
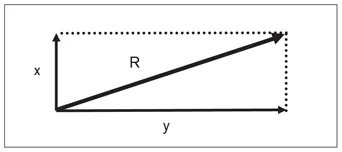
Fig 1-6 The separation of a resultant vector into components on an x- and y-axis coordinate system.
Force
Force is the effect that causes an object in space to change its place or its shape. In orthodontics, the force is measured in grams, ounces, or Newtons. Force is a vector having the characteristics of line of action, direction, magnitude, and point of application. In the application of orthodontic forces, some factors such as distribution and duration are also important. During tipping of a tooth, force is concentrated at the alveolar crest on one side and at the apex on the other (Fig 1-7a). During translation, however, the force is evenly distributed onto the bone and root surfaces (Fig 1-7b).
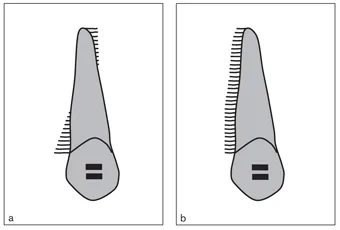
Fig 1-7 Distribution of force on the bone and root surfaces in tipping (a) and translatory (b) movements. During tipping, the possibility of indirect bone resorption is high because the forces are concentrated in small areas. Therefore, the forces must be kept as low as possible.
Forces according to their duration
Constancy of force
Clinically, optimal force is the amount of force resulting in the fastest tooth movement without damage to the periodontal tissues or discomfort to the patient. To achieve an optimum biologic response in the periodontal tissues, light, continuous force is important.1 Figure 1-8 compares the amount of loss of force occurring over time on the force levels of two coil springs of high and low load/deflection rates.2
Continuous forces A continuous force can be obtained by using wires with low load/deflection rate and high working range. In the leveling phase, where there is considerable variation in level between teeth, it is advantageous to use these wires to control anchorage and maintain longer inte...
Table of contents
- Cover Page
- Title Page
- Copyright Page
- Contents
- Preface
- 1. Physical Principles
- 2. Application of Orthodontic Force
- 3. Analysis of Two-Tooth Mechanics
- 4. Frictional and Frictionless Systems
- 5. Anchorage Control
- 6. Correction of Vertical Discrepancies
- 7. Correction of Transverse Discrepancies
- 8. Correction of Anteroposterior Discrepancies
- 9. Space Closure
- Glossary
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Biomechanics in Orthodontics by Ram S. Nanda,Yahya S. Tosun in PDF and/or ePUB format, as well as other popular books in Medicine & Dentistry. We have over 1.5 million books available in our catalogue for you to explore.