- 511 pages
- English
- ePUB (mobile friendly)
- Available on iOS & Android
eBook - ePub
About this book
Electric Motors and Drives: Fundamentals, Types and Applications, Fifth Edition is intended primarily for non-specialist users or students of electric motors and drives, but many researchers and specialist industrialists have also acknowledged its value in providing a clear understanding of the fundamentals. It bridges the gap between specialist textbooks (too analytical for the average user) and handbooks (full of detail but with little insight) providing an understanding of how each motor and drive system works.
The fifth edition has been completely revised, updated and expanded. All of the most important types of motor and drive are covered, including d.c., induction, synchronous (including synchronous reluctance and salient Permanent Magnet), switched reluctance, and stepping. There has been significant innovation in this area since the fourth edition, particularly in the automotive, aircraft and industrial sectors, with novel motor topologies emerging, including hybrid designs that combine permanent magnet and reluctance effects. We now include a physical basis for understanding and quantifying torque production in these machines, and this leads to simple pictures that illuminate the control conditions required to optimise torque. The key converter topologies have been brought together, and the treatment of inverter switching strategies expanded.
A new chapter is devoted to the treatment of Field Oriented control, reflecting its increasing importance for all a.c. motor drives. A unique physically-based approach is adopted which builds naturally on the understanding of motor behaviour developed earlier in the book: the largely non-mathematical treatment dispels much of the mystique surrounding what is often regarded as a difficult topic.
- Helps users acquire knowledge and understanding of the capabilities and limitations of motors and drives without struggling through unnecessary math and theory
- Presents updated material on the latest and most widely-used motors and drives, including brushless servo motors
- Includes additional diagrams and worked examples throughout this updated edition
- Includes a physical basis for the understanding and quantifying torque production
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
Study more efficiently using our study tools.
Information
Chapter 1
Electric motors—The basics
Abstract
Non-specialist readers wishing to learn the essence of how and why motors work will find answers in this chapter. We discuss how to quantify magnetic effects, explain how force and torque are generated, and show that the elegant energy-converting process can be predicted using a simple equivalent circuit. The key factors that underpin the operation of all types of motor emerge, and we conclude by identifying the simple design parameters that determine the relationship between rotor volume and torque.
Keywords
Magnetic field; Magnetomotive force (m.m.f.); Magnetic circuit; Reluctance; Torque; Motional e.m.f.; Energy conversion; Primitive motor
1.1 Introduction
Electric motors are so much a part of everyday life that we seldom give them a second thought. When we switch on an ancient electric drill, for example, we confidently expect it to run rapidly up to the correct speed, and we don’t question how it knows what speed to run at, nor how it is that once enough energy has been drawn from the supply to bring it up to speed, the power drawn falls to a very low level. When we put the drill to work it draws more power, and when we finish the power drawn from the supply reduces automatically, without intervention on our part.
The humble motor, consisting of nothing more than an arrangement of copper coils and steel laminations, is clearly rather a clever energy converter, which warrants serious consideration. By gaining a basic understanding of how the motor works, we will be able to appreciate its potential and its limitations, and (in later chapters) see how its already remarkable performance is dramatically enhanced by the addition of external electronic controls.
The great majority of electric motors have a shaft which rotates, but linear electric motors have niche applications, and whilst they appear very different from their rotating sister, their principle of operation is the same.
This chapter deals with the basic mechanisms of motor operation, so readers who are already familiar with such matters as magnetic flux, magnetic and electric circuits, torque, and motional e.m.f. (electromotive force) can probably afford to skim over much of it. In the course of the discussion, however, several very important general principles and guidelines emerge. These apply to all types of motor and are summarised in Section 1.9. Experience shows that anyone who has a good grasp of these basic principles will be well equipped to weigh the pros and cons of the different types of motor, so all readers are urged to absorb them before tackling other parts of the book.
1.2 Producing rotation
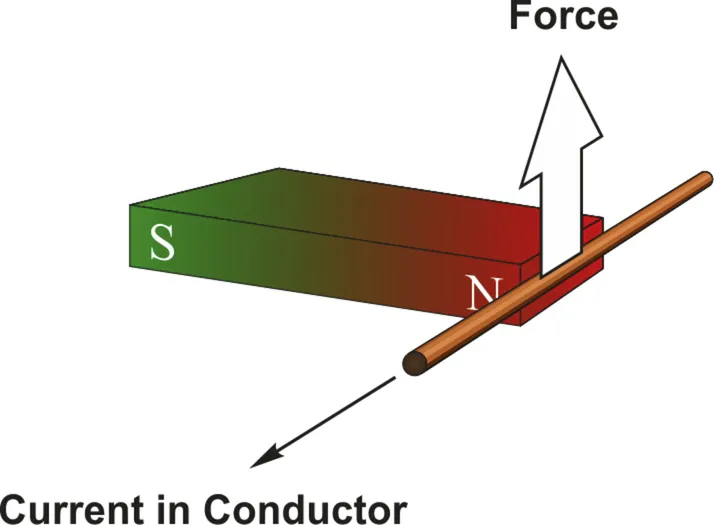
Nearly all motors exploit the force which is exerted on a current-carrying conductor placed in a magnetic field. The force can be demonstrated by placing a bar magnet near a wire carrying current (Fig. 1.1), but anyone trying the experiment will probably be disappointed to discover how feeble the force is, and will doubtless be left wondering how such an unpromising effect can be used to make effective motors.
We will see that in order to make the most of the mechanism, we need to arrange for there to be a very strong magnetic field, and for it to interact with many conductors, each carrying as much current as possible. We will also see later that although the magnetic field (or ‘excitation’) is essential to the working of the motor, it acts only as a catalyst, and all of the mechanical output power comes from the electrical supply to the conductors on which the force is developed.
It will emerge later that in some motors the parts of the machine responsible for the excitation and for the energy converting functions are distinct and self-evident. In the d.c. motor, for example, the excitation is provided either by permanent magnets or by field coils wrapped around clearly-defined projecting field poles on the stationary part, while the conductors on which force is developed are on the rotor and supplied with current via sliding contacts known as brushes. In many motors, however, there is no such clear-cut physical distinction between the ‘excitation’ and the ‘energy-converting’ parts of the machine, and a single stationary winding serves both purposes. Nevertheless, we will find that identifying and separating the excitation and energy-converting functions is always helpful to understanding both how motors of all types operate, and their performance characteristics.
Returning to the matter of force on a single conductor, we will look first at what determines the magnitude and direction of the force, before turning to ways in which the mechanism is exploited to produce rotation. The concept of the magnetic circuit will have to be explored, since this is central to understanding why motors have the shapes they do. Before that a brief introduction to the magnetic field and magnetic flux and flux density is included for those who are not already familiar with the ideas involved.
1.2.1 Magnetic field and magnetic flux
When a current-carrying conductor is placed in a magnetic field, it experiences a force. Experiment shows that the magnitude of the force depends directly on the current in the wire, and the strength of the magnetic field, and that the force is greatest when the magnetic field is perpendicular to the conductor.
In the set-up shown in Fig. 1.1, the source of the magnetic field is a bar magnet, which produces a magnetic field as shown in Fig. 1.2.
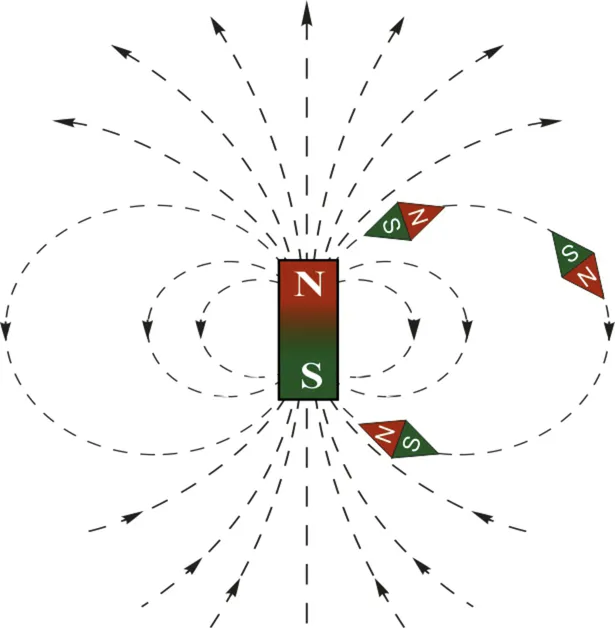
The notion of a ‘magnetic field’ surrounding a magnet is an abstract idea that helps us to come to grips with the mysterious phenomenon of magnetism: it not only provides us with a convenient pictorial way of picturing the directional effects, but it also allows us to quantify the ‘strength’ of the magnetism and hence permits us to predict the various effects produced by it.
The dotted lines in Fig. 1.2 are referred to as magnetic flux lines, or simply flux lines. They indicate the direction along which iron filings (or small steel pins) would align themselves when placed in the field of the bar magnet. Steel pins have no initial magnetic field of their own, so there is no reason why one end or the other of the pins should point to a particular pole of the bar magnet.
However, when we put a compass needle (which is itself a permanent magnet) in the field we find that it aligns itself as shown in Fig. 1.2. In the upper half of the figure, the S end of the diamond-shaped c...
Table of contents
- Cover image
- Title page
- Table of Contents
- Copyright
- Preface
- Chapter 1: Electric motors—The basics
- Chapter 2: Power electronic converters for motor drives
- Chapter 3: D.C. motors
- Chapter 4: D.C. motor drives
- Chapter 5: Induction motors—Rotating field, slip and torque
- Chapter 6: Induction motor—Operation from 50/60 Hz supply
- Chapter 7: Variable frequency operation of induction motors
- Chapter 8: Field oriented control of induction motors
- Chapter 9: Synchronous, permanent magnet and reluctance motors and drives
- Chapter 10: Stepping and switched reluctance motors
- Chapter 11: Motor/drive selection
- Appendix: Solutions to review questions
- Further reading
- Index
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
- Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
- Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go.
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Electric Motors and Drives by Austin Hughes,Bill Drury in PDF and/or ePUB format, as well as other popular books in Technology & Engineering & Electrical Engineering & Telecommunications. We have over 1.5 million books available in our catalogue for you to explore.