[. . .] Dr. Popko's elegant new book extends both the science and the art of spherical modeling to include Computer-Aided Design and applications, which I would never have imagined when I started down this fascinating and rewarding path.
His lovely illustrations bring the subject to life for all readers, including those who are not drawn to the mathematics. This book demonstrates the scope, beauty, and utility of an art and science with roots in antiquity. [. . .] Anyone with an interest in the geometry of spheres, whether a professional engineer, an architect or product designer, a student, a teacher, or simply someone curious about the spectrum of topics to be found in this book, will find it helpful and rewarding. – Magnus Wenninger, Benedictine Monk and Polyhedral Modeler
Ed Popko's comprehensive survey of the history, literature, geometric, and mathematical properties of the sphere is the definitive work on the subject. His masterful and thorough investigation of every aspect is covered with sensitivity and intelligence. This book should be in the library of anyone interested in the orderly subdivision of the sphere. – Shoji Sadao, Architect, Cartographer and lifelong business partner of Buckminster Fuller
Edward Popko's Divided Spheres is a "thesaurus" must to those whose academic interest in the world of geometry looks to greater coverage of synonyms and antonyms of this beautiful shape we call a sphere. The late Buckminster Fuller might well place this manuscript as an all-reference for illumination to one of nature's most perfect inventions. – Thomas T. K. Zung, Senior Partner, Buckminster Fuller, Sadao, & Zung Architects.
This first edition of this well-illustrated book presented a thorough introduction to the mathematics of Buckminster Fuller's invention of the geodesic dome, which paved the way for a flood of practical applications as diverse as weather forecasting and fish farms. The author explained the principles of spherical design and the three classic methods of subdivision based on geometric solids (polyhedra).
This thoroughly edited new edition does all that, while also introducing new techniques that extend the class concept by relaxing the triangulation constraint to develop two new forms of optimized hexagonal tessellations. The objective is to generate spherical grids where all edge (or arc) lengths or overlap ratios are equal.
New to the Second Edition
New Foreword by Joseph Clinton, lifelong Buckminster Fuller collaborator
A new chapter by Chris Kitrick on the mathematical techniques for developing optimal single-edge hexagonal tessellations, of varying density, with the smallest edge possible for a particular topology, suggesting ways of comparing their levels of optimization
An expanded history of the evolution of spherical subdivision
New applications of spherical design in science, product design, architecture, and entertainment
New geodesic algorithms for grid optimization
New full-color spherical illustrations created using DisplaySphere to aid readers in visualizing and comparing the various tessellations presented in the book
Updated Bibliography with references to the most recent advancements in spherical subdivision methods
Trusted by 375,005 students
Access to over 1.5 million titles for a fair monthly price.
We owe the word sphere to the Greeks; sphaira means ball or globe. The Greeks saw the sphere as the purest expression of form, equal in all ways, and placed it at the pinnacle of their mathematics. Today, the sphere remains a focus of astronomers, mathematicians, artisans, and engineers because it is one of nature's most recurring forms, and it's one of man's most useful.
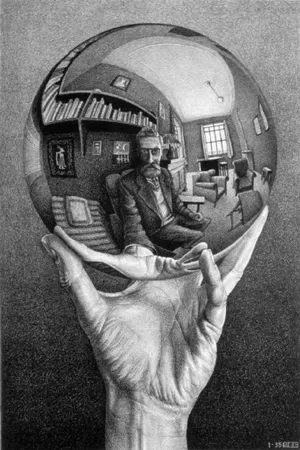
The sphere, so simple and yet so complex, is a paradox. A featureless, spinning sphere does not even appear to be rotating; all views remain the same. There is no top, front, or side view. All views look the same. The Dutch artist M. C. Escher (1898–1972) ably illustrated this truth in his 1935 lithograph where the artist holds a reflective sphere in his hand as he sits in his Rome studio.1 It's easy to see that even if Escher were to rotate the sphere, the reflected image would not change. His centered eyes could never look elsewhere; the view of the artist and his studio would be unchanging. His sphere has no orientation, only a position in space.
The sphere is a surface and easy to define with the simplest of equations, yet this surface is difficult to manage.2 A sphere is a closed surface with every location on its surface equidistant from an infinitely small center point. A mathematician might go one step further and say the sphere is an unbounded surface with no singularities, which means there are no places where it cannot be defined. There are no exceptions.
2 The equation of a sphere is very simple. For a sphere whose three-dimensional Cartesian origin is (0, 0, 0), a point on the sphere must satisfy the equation .
The sphere is unusual, it has no edges, and it is undevelopable. By undevelopable, we mean that you cannot flatten it out onto a two-dimensional plane without stretching, tearing, squeezing, or otherwise distorting it.3 You can test this yourself by trying to flatten an orange without distorting it. You can't without stretching or tearing it no matter how small or large the orange is.
Any plane through the center of the sphere intersects the sphere in a great circle. For any two points, not opposite each other on the sphere (opposite points are called antipodal points), the shortest path joining the points is the shorter arc of the great circle through the points, and this arc is called a geodesic. Geodesics are the straightest lines joining the points; they are the best we can do since we can't use straight lines or chords in three dimensions when we measure distance along the sphere. The length of a geodesic arc is defined as the distance between the two points on the sphere.4
Like the equator on a globe, any great circle separates the sphere into two hemispheres. A plane not passing through the origin that intersects the sphere either meets the sphere in a single point or it intersects the sphere in a small circle, also called a lesser circle. Small circles separate the sphere into two caps, one of which is smaller than a hemisphere and resembles a contact lens. We use spherical caps later in the book to compare spherical subdivisions.
Great circles play a dual role when subdividing spheres. Points define great circles and great circle intersections create more points. When we start to subdivide a sphere, we typically start with just a few points that define a relatively small number of great circles. We define more points by intersecting various combinations of the great circles. The new points derived from intersections can now be used to define more great circles, and the cycle repeats. You can see already that we are going to make great use of the dual role of great circles when we describe the various techniques and their resulting grids in Chapter 8. The difference in techniques is primarily how we define the initial set of points and great circles, and what combinations of great circles we select to intersect to define additional points.
Spherical polygons are polygons created on the surface of a sphere by segments of intersecting great circles. Spherical polygons demonstrate other differences between spherical and plane Euclidean geometry. The sides of spherical polygons are always great circle arcs. As a result, two-sided polygons are possible. Just look at a beach ball or slices of an orange or apple for examples. These two-sided polygons are called lunes or bigons (bi instead of polygons). Spherical triangles are also different. They can have one, two, or three right angles. And one of the oddest differences between spherical and Euclidean geometry is that there are no similar triangles on a sphere! They are either congruent or they are different. In plane Euclidean geometry, three angles define an infinite number of triangles differing only by the proportional length of their sides. But on a sphere, triangles cannot be similar unless they are actually congruent.
3 The Swiss mathematician and physicist Leonhard Euler (1707–1783) did intense research on mathematical cartography (mapmaking). In a technical paper, “On the geographic projection of the surface of a sphere,” published by the St. Petersburg Academy in 1777, he proved that it was not possible to represent a spherical surface exactly (preserving all distances and angles) on a plane. The surface of a sphere is undevelopable.
4 The word geodesic comes from geodesy, the science or measuring the size and shape of the Earth. A geodesic was the shortest distance between two points on Earth's surface, but today, it is used in other contexts such as geodesic domes.
The sphere is a challenging but fascinating place to work. With all of these differences, how do we work with spheres and what Euclidean principles, if any, can we use?
1.1 Working with Spheres
A sphere can be any size at all. Its radius, r, could be any distance and range from subatomic dimensions, to the size of a playground dome, to light-years across the observable universe. To make spheres easier to work with when their radius could be anything, we treat r as a positive real number and make it equal to one unit. A sphere with a unit radius is called a unit sphere. One what? Are we talking about 1 mile, 1 foot, 1 inch, or one anything? Yes, to all these questions. Unit spheres, ones where r = 1, are easy to calculate, and any spherical result is easily converted to an actual dimension such as miles, feet, inches, or whatever. Angles do not have to be converted; they are used as-is no matter the size of the sphere. However, for distances, lengths, and areas, we need to convert unit sphere dimension into the true radius of the sphere our application needs.
1.2 Making a Point
Although the sphere is an infinite set of points all equally distant from its center, practical design applications require us to locate specific points on the surface that relate to the design we have in mind. Locating points requires us to define a reference system and orientation for our work. In the simplest case, placing the sphere's center at the center of the Cartesian axis system, the familiar xyz-coordinate system we use most often, we have defined at least six special reference points on the sphere's surface, one for the positive and negative points where each coordinate axis intersects the sphere's surface. In so doing, we have also adopted standard design conventions where we can refer to a top, bottom, side, or front, if we need to. We are off to a good start. Out next challenge is to define points on the surface that help us with our design. So how do we do this?
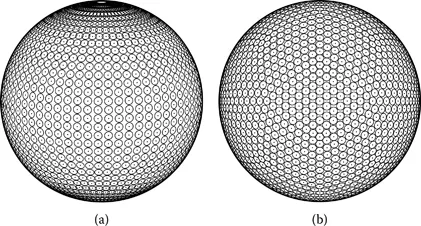
It's natural to think of points on a sphere like points around a circle. While it is easy to evenly distribute any number of points around the circumference of a circle, doing so on the surface of a sphere is actually quite difficult and certain numbers of points are impossible. Figure 1.1 gives us a sense of the problem. In Figure 1.1(a), an equal number of points are arranged around rings, or lesser circles, similar to the lines of latitude on Earth. Small circles surround each point to give a visual indicator of their spacing. We see that as the lesser circles get closer and closer to the sphere's two poles, the points around them are getting closer and closer together; the circles surrounding them are overlapping. At the two poles, dozens of points are nearly superimposed. In this subdivision, the points are not uniformly distributed at all.
Figure 1.1.Distributing points on a sphere.
In Figure 1.1(b), we see a dramatically different distribution for the same number of points as in (a). Clearly, they are more uniformly spaced with a consistent symmetry and appearance. Notice that while some circles touch, none overlap. A grid connecting each point with its nearest neighbors would produce consistently shaped triangles, whereas in the first layout they won't. These two layouts illustrate our geometric challenge when we subdivide a sphere—how do we define arrangements like the one in (b) that give us freedom to have more or fewer points that allow us to make different shapes on the sphere's surface that meet our design requirements?
We know that on a circle, we can evenly space an arbitrary number of points—say, 256, or 2,011, 9, or 37 points. In a sense, this logic is what was used in Figure 1.1(a). So why can't we evenly space an arbitrary number of points and get the result shown in (b)? The answer lies in the number of points we try to distribute and how symmetrical we want their arrangement to be. Let's look at each of these related design ...
Table of contents
Cover
Half Title
Title Page
Copyright Page
Dedication
Table of Contents
Foreword
Preface
Acknowledgments
1. Divided Spheres
2. Bucky's Dome
3. Putting Spheres to Work
4. Circular Reasoning
5. Distributing Points
6. Polyhedral Frameworks
7. Golf Ball Dimples
8. Subdivision Schemas
9. Comparing Results
10. Self-Organizing Grids
A. Stereographic Projection
B. Coordinate Rotations
C. Geodesic Math
Bibliography
Index
About the Authors
Frequently asked questions
Yes, you can cancel anytime from the Subscription tab in your account settings on the Perlego website. Your subscription will stay active until the end of your current billing period. Learn how to cancel your subscription
No, books cannot be downloaded as external files, such as PDFs, for use outside of Perlego. However, you can download books within the Perlego app for offline reading on mobile or tablet. Learn how to download books offline
Perlego offers two plans: Essential and Complete
Essential is ideal for learners and professionals who enjoy exploring a wide range of subjects. Access the Essential Library with 800,000+ trusted titles and best-sellers across business, personal growth, and the humanities. Includes unlimited reading time and Standard Read Aloud voice.
Complete: Perfect for advanced learners and researchers needing full, unrestricted access. Unlock 1.5M+ books across hundreds of subjects, including academic and specialized titles. The Complete Plan also includes advanced features like Premium Read Aloud and Research Assistant.
Both plans are available with monthly, semester, or annual billing cycles.
We are an online textbook subscription service, where you can get access to an entire online library for less than the price of a single book per month. With over 1.5 million books across 990+ topics, we’ve got you covered! Learn about our mission
Look out for the read-aloud symbol on your next book to see if you can listen to it. The read-aloud tool reads text aloud for you, highlighting the text as it is being read. You can pause it, speed it up and slow it down. Learn more about Read Aloud
Yes! You can use the Perlego app on both iOS and Android devices to read anytime, anywhere — even offline. Perfect for commutes or when you’re on the go. Please note we cannot support devices running on iOS 13 and Android 7 or earlier. Learn more about using the app
Yes, you can access Divided Spheres by Edward S. Popko,Christopher J. Kitrick in PDF and/or ePUB format, as well as other popular books in Mathematics & History of Architecture. We have over 1.5 million books available in our catalogue for you to explore.