![]()
Capitolo 1
LEONARDO, IL CAVALIERE, L’ANDROIDE
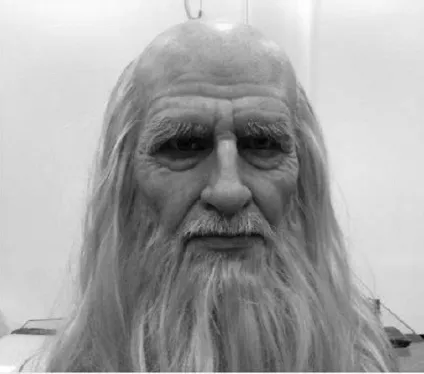
La lunghissima barba bianca che incornicia il volto solenne e solcato dalle rughe, lo sguardo austero e intenso che sotto le sopracciglia folte scruta tutto ciò che accade intorno, le mani appoggiate sulle ginocchia… è impossibile non riconoscerlo: è Leonardo da Vinci. Anzi, il suo androide. L’ha costruito in Giappone il gruppo di Minoru Asada, dell’università di Osaka, con l’intenzione di portare all’Expo 2015 un contributo memorabile. In effetti l’androide di Leonardo da Vinci è il primo robot ispirato a un personaggio storico e la scelta non è avvenuta per caso. Asada è convinto che “se Leonardo fosse vivo, oggi lavorerebbe nella robotica”.
Ha ragione perché, tra le fantastiche macchine progettate da Leonardo, c’è stato anche un automa. Un automa-cavaliere, per la precisione, quindi un umanoide. Leonardo lo aveva progettato intorno al 1495 in onore di Ludovico Sforza, ma non si sa se lo abbia mai costruito. Il progetto, disperso per moltissimo tempo, è stato ritrovato soltanto intorno al 1950. Era contenuto in parte nel Codice Atlantico e in taccuini che risalgono al periodo compreso fra il 1495 e il 1497, ma mettere insieme una descrizione chiara e completa della macchina è stato un rompicapo. Tutti coloro che hanno provato a ricostruirla, a partire dal 1996, non sono riusciti a trovare una soluzione definitiva. Il problema non era nell’aspetto esteriore: l’automa cavaliere indossava un’armatura della fine del Quattrocento, in stile italo-tedesco. Per l’interno, invece, le cose erano state più complicate. La struttura era in legno, con elementi in pelle e metallo; meccanismi basati su carrucole e cavi permettevano all’automa di stare in piedi e seduto, di alzarsi per salutare, di muovere le braccia, la testa e la mandibola, forse emettendo i suoni prodotti da un meccanismo a percussioni che si trovava nel torace. Probabilmente le gambe venivano mosse da manovelle esterne. Riordinando i numerosi schemi che Leonardo aveva tracciato sui taccuini, però, non tutto è tornato al suo posto e sul ruolo di alcuni meccanismi è rimasto un punto interrogativo.
Figura 1.1 – Leonardo androide, realizzato dal gruppo di Minoru Asada, università di Osaka (fonte: Research at the Osaka University).
Possiamo considerare Leonardo, il cavaliere meccanico che aveva progettato e il Leonardo-androide i simboli di una lunghissima storia che ha visto i robot trasformarsi da automi destinati al divertimento e allo spettacolo in macchine dedicate al lavoro nelle fabbriche, e poi in collaboratori dell’uomo destinati a entrare nelle case.
Il cavaliere meccanico di Leonardo non è stato il primo automa della storia, molti altri ne erano stati costruiti in precedenza, nell’antica Grecia come nell’antica Cina e nell’Egitto di Tolomeo: macchine realizzate per divertire, incuriosire e stupire, a volte per dimostrare principi scientifici. Lo stesso termine “automa” ha origini greche. Indica qualcosa che agisce di propria volontà e venne utilizzato per la prima volta da Omero nell’Iliade per descrivere i venti tripodi forgiati dal dio Efesto, in grado di muoversi autonomamente grazie a ruote d’oro. Dai miti greci sono arrivate anche le prime descrizioni di automi, macchine dall’aspetto umanoide come Talos, il gigante di bronzo a guardia dell’isola di Creta e costruito anche questo da Efesto, o come le statue animate inventate da Dedalo e citate da Platone nel suo dialogo sulla virtù, il Menone. Ma Platone si era imbattuto anche in macchine reali. Le aveva costruite Archita di Taranto, vissuto dal 428 al 360 a.C., e la più famosa era una colomba di legno cava all’interno e riempita di aria compressa la cui fuoriuscita era controllata da una valvola regolata da un sistema di contrappesi. Appoggiata sul ramo di un albero, la colomba volava e saliva sempre più in alto non appena la valvola veniva aperta. Circa un secolo più tardi ad Alessandria d’Egitto il greco Ctesibio (285-222 a.C.), celebre per gli orologi ad acqua e per altre grandi opere idrauliche, utilizzava la stessa tecnologia per costruire automi, come un gufo capace di muoversi e il primo orologio a cucù.
La passione per gli automi raggiunse anche il Medio Oriente, dove il matematico e inventore Al-Jazari (1136-1206) aveva costruito un automa umanoide dall’aspetto di una ragazza capace di servire il tè e altre bevande. Sempre di Al-Jazari erano i quattro automi musicisti che suonavano a bordo di una barca che galleggiava su un lago, allietando le feste reali: un gioco da ragazzi rispetto ai 50 automi che aveva descritto nel suo Compendio sulla Teoria e sulla Pratica delle Arti Meccaniche, con tanto di istruzioni per costruirli.
Circa due secoli più tardi, in Europa, il matematico tedesco Johannes Müller von Königsberg (1436-1476), più noto come Regiomontano, costruiva un’aquila di legno in grado di volare. A metà del Cinquecento in Inghilterra, nell’università di Cambridge, nel bel mezzo della rappresentazione della commedia di Aristofane La pace si diffuse il panico tra il pubblico per l’arrivo sulla scena di uno scarabeo volante così realistico da essere additato come un’opera del demonio. Lo aveva costruito invece uno studente, John Dee (1527-1608 o 1609), destinato a diventare matematico e astronomo, astrologo ed esperto di filosofia occulta alla corte della regina Elisabetta I.
Gli automi hanno continuato a lungo a essere protagonisti delle scene e dei salotti per stupire e affascinare e nel Settecento hanno vissuto il loro momento d’oro. Nel 1760 l’orologiaio tedesco Friedrich von Knauss (1724-1789) aveva costruito un meccanismo in grado di suonare strumenti musicali e di scrivere brevi frasi. Creò ben cinque scrivani meccanici e nessuno aveva un aspetto umano. Il primo venne presentato in Francia nel 1753. Il meccanismo, di rame rivestito d’argento, era alto un metro e largo 68 centimetri ed era racchiuso in un contenitore in cima al quale si trovava una mano che teneva una penna d’oca; solo successivamente la mano venne collegata alla statuetta di una figura femminile. L’unico elemento mobile di questo automa era il braccio, che si muoveva per intingere nel calamaio la penna d’oca e per scrivere su un foglio di carta delle semplici frasi.
Circa venti anni più tardi è stata la volta delle bambole animate, costruite fra il 1768 e il 1774 dalla famiglia svizzera di orologiai Jaquet-Droz e considerate i predecessori dei computer. Erano una musicista, un disegnatore e uno scrivano ed erano state realizzate da Pierre Jaquet-Droz (1721-1790) e dal figlio Henri-Louis (1752-1791), in collaborazione con Jean-Frédéric Leschot (1746-1824), anche lui svizzero. L’obiettivo iniziale era attrarre nuovi clienti e incrementare le vendite di orologi, ma in brevissimo tempo le tre bambole ebbero un successo straordinario.
La bambola musicista, composta da 2500 pezzi, suonava un organo e la musica veniva effettivamente prodotta dall’automa schiacciando i tasti, come fanno i musicisti in carne e ossa. Quando la bambola suonava, il busto si muoveva accompagnando i movimenti delle mani, e così la testa e gli occhi.
La seconda bambola, il disegnatore, era composta da 2000 pezzi e aveva l’aspetto di un bambino. Era in grado di disegnare quattro diverse immagini: un ritratto di Luigi XV, una coppia reale (probabilmente Maria Antonietta e Luigi XVI), un cane accompagnato dalla scritta “mon toutou” (il mio cagnolino) e Cupido che guidava un cocchio trainato da una farfalla. Un meccanismo rotante faceva muovere le mani avanti e indietro, mentre un altro sollevava la matita dal foglio. L’automa si muoveva sulla sedia e di tanto in tanto soffiava sul foglio per rimuovere la polvere.
La terza bambola automa, lo scrittore, era la più complessa. Composta da 6000 pezzi, per ciascuna lettera dell’alfabeto utilizzava un sistema simile a quello che faceva funzionare il disegnatore. Grazie a questo meccanismo, era in grado di scrivere testi di 40 caratteri, codificati su una ruota nella quale le lettere venivano selezionate una a una. La bambola scriveva con una penna d’oca, che intingeva regolarmente nell’inchiostro e che poi agitava con un rapido movimento del polso per evitare di sgocciolare sul foglio. Il successo delle bambole meccaniche fu tale da renderle famose nel mondo, facendo degli automi un’attrazione irresistibile.
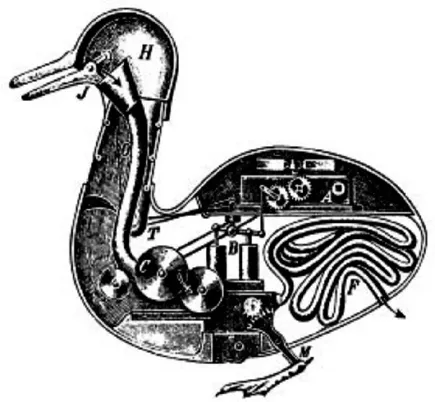
A questo incredibile successo contribuì anche il francese Jacques de Vaucanson (1709-1782) con le sue macchine capaci di suonare, disegnare e volare. Nel 1737 costruì il suonatore di tamburino, che aveva un repertorio di 12 canzoni, e l’anno successivo lo presentò all’Accademia delle Scienze, che ne apprezzò la meccanica innovativa. Il più celebre dei suoi automi era l’anatra meccanica, del 1739, composta da oltre 400 parti mobili: sapeva agitare le ali e allungare il collo per mangiare e bere e, soprattutto, digeriva. Ovviamente all’interno dell’automa non aveva luogo alcun processo di digestione reale. In realtà il cibo veniva raccolto in un contenitore interno e le feci, preinserite in un altro scomparto, venivano espulse da un secondo contenitore.
La macchina era solo in parte trasparente e consentiva agli spettatori di intravedere una parte del meccanismo, lasciando fantasticare il pubblico su quell’automa prodigioso. Esposta al Palais-Royal nel 1744, l’anatra è stata purtroppo distrutta nel 1879 nell’incendio del museo russo di Nižnij Novgorod.
Anche le teste parlanti costruite nel 1783 dall’abate Mical attirarono un grandissimo interesse sia del pubblico, sia dell’Accademia francese delle Scienze.
Figura 1.2 – I meccanismi dell’anatra di Vaucanson.
La moda degli automi impazzava anche in Giappone, dove l’ingegnere e inventore Hisashige Tanaka (1799-1881) aveva costruito macchine capaci di servire il tè e dipingere. All’età di 20 anni cominciò a costruire bambole animate da meccanismi basati su molle e pistoni e capaci di movimenti relativamente complessi, che andavano per la maggiore tra gli aristocratici del tempo. Tuttavia una decina di anni più tardi la moda era già passata e, a partire dal 1834, a Osaka, si dedicò alla progettazione di altri meccanismi, tanto da conquistarsi la fama di Thomas Edison del Giappone. Nel 1875 le bambole erano un lontano ricordo e tutte le energie di Hisashige Tanaka erano rivolte all’azienda che aveva appena fondato, la Toshiba.
Tornando in Europa, il successo degli automi era stato tale che qualcuno pensò di approfittare della situazione. Nel 1769 l’ungherese Wolfgang von Kempelen (1734-1804) divenne celebre in tutto il mondo occidentale con il suo Turco, che presentava come un automa capace di giocare a scacchi. Apparentemente un manichino spostava i pezzi su una scacchiera appoggiata su un grande contenitore al cui interno avrebbero dovuto trovarsi gli ingranaggi. Questi, però, lasciavano libero uno spazio sufficiente ad accogliere una persona di piccola statura e abilissima negli scacchi. Così nascosto, il giocatore riusciva a seguire le mosse dell’avversario grazie a magneti fissati sotto i pezzi degli scacchi, mentre alla luce di una candela seguiva l’andamento della partita su una piccola scacchiera, studiando le mosse che avrebbe fatto il presunto automa e guidandole spostando le braccia. Il fumo di due candele accese sul contenitore, accanto alla scacchiera, confondeva quella della candela nascosta, che usciva dal turbante del manichino. Il segreto del Turco venne rivelato soltanto nella seconda metà dell’Ottocento.
Questa lunghissima tradizione di macchine destinate al divertimento è andata gradualmente esaurendosi. La moda passò, ma accadde qualcosa di nuovo: il 25 gennaio 1921 nel Teatro nazionale di Praga andò in scena il dramma fantascientifico R.U.R. di Karel Čapek. Il titolo era l’acronimo di “Rossumovi univerzální roboti”, ossia “i robot universali di Rossum”: per la prima volta veniva utilizzato il termine “robot”, derivato dalla parola ceca “robota”, che significa “lavoro pesante”. Ad associare agli automi il termine “robot” non era stato però Čapek: lo stesso drammaturgo disse che l’idea era stata di suo fratello Josef. Nel dramma i robot erano esseri sintetici fatti di materia organica, costruiti per alleggerire gli uomini dai lavori più faticosi. Oltre al nome, per gli automi c’era un’altra novità: per la prima volta dopo secoli abbandonavano il divertimento per essere associati al lavoro.
Il nuovo destino cominciò a realizzarsi nel 1937 con l’arrivo di Gargantua, il grande braccio robotico capace di sollevare blocchi di legno e di sovrapporli in strutture ordinate. Era una macchina imponente, simile a una gru, progettata e realizzata nel 1937 dal canadese Griffith P. Taylor, di Toronto. La rivista che presentò Gargantua al pubblico, il Meccano Magazine, nel marzo 1938 descriveva la macchina come il frutto di una visione del futuro nella quale il lavoro dell’uomo non sarebbe più stato necessario per realizzare i progetti di ingegneri e architetti.
La storia dei robot aveva voltato pagina. Un altro cambiamento importante arrivò quando i robot si trasformarono in macchine con comandi elettronici. Autore di questo cambiamento radicale è stato William Grey Walter (1910-1977), un neurofisiologo di nazionalità britannica nato negli Stati Uniti. Costruì i primi robot elettronici autonomi fra il 1948 e il 1949. Si chiamavano Machina Speculatrix, Elmer ed Elsie, ma si erano conquistati il nomignolo di tartarughe sia per la forma, leggermente curva e basata su tre ruote, sia per la lentezza dei loro movimenti.
C’erano ormai tutti gli ingredienti perché i robot facessero il grande passo per entrare a tutti gli effetti nel mondo del lavoro.
A rendere possibile questo salto di qualità fu l’americano George Devol (1912-2011), che nel 1954 brevettò il primo robot e che due anni più tardi fondò, insieme a Joseph F. Engelberger, la prima azienda specializzata in robot, la Unimation. È lì che nel 1956 venne prodotto Unimate, un braccio robotico programmabile per trasferire oggetti da un punto a un altro. Nel 1961 Unimate fu venduto a un’azienda, la General Motors, che lo utilizzò per sostituire l’uomo in compiti pericolosi, come prelevare parti di metallo incandescenti dalla macchina per la pressofusione e saldarle.
Un altro braccio robotico venne costruito nel 1969 da Victor Scheinman, dell’università californiana di Stanford. Era capace di movimenti molto articolati e, grazie a queste caratteristiche, poteva essere utilizzato per compiti complessi, come assemblare e saldare. Un secondo braccio robotico progettato da Scheinman, questa volta al Massachusetts Institute of Technology (MIT), si chiamava Mit Arm. Venne venduto alla Unimation, che sviluppò ulteriormente il progetto in collaborazione con la General Motors e lo mise sul mercato con il nome di Puma (Programmable Universal Machine for Assembly).
Anche in Europa la robotica industriale si sviluppò rapidamente e i primi robot destinati alle fabbriche arrivarono sul mercato nel 1973. Non erano degli umanoidi: il primo modello, chiamato Famulus, aveva ben sei bracci articolati e venne sviluppato dalla tedesca Kuka Robotics. Era stato uno dei primi robot articolati. Nell’anno successivo la ABB Robotics produceva IRB 6, che fece il suo ingresso nel mondo del lavoro in Svezia, dove venne utilizzato per pulire le tubature. Nell’arco di una decina di anni l’interesse per i robot industriali continuò ad aumentare progressivamente, fino a vivere un vero e proprio boom nel 1984. In quell’anno la Unimation venne acquisita dalla statunitense Westinghouse Electric Corporation per 107 milioni di dollari. Nel 1988 l’azienda venne venduta ancora, alla francese Stäubli Faverges SCA, che nel 2004 ha venduto la sua divisione di robotica alla Bosch. In breve tempo i bracci robotici sono diventati una presenza indispensabile nelle fabbriche e, tutto sommato, quasi scontata.
Ma perché parlare di macchine come queste se finora tutta l’attenzione si è concentrata sugli automi umanoidi? Perché le storie di entrambi finiscono per confluire, aprendo insieme una nuova pagina nell’evoluzione degli automi. Dopo i robot industriali, grandi, pesanti e programmati in modo rigido, l’idea è rendere i robot più sicuri nel contatto fisico con l’essere umano. Se i robot industriali degli anni Ottanta erano programmati per un unico compito e all’interno delle fabbriche occupavano gli spazi che venivano loro rigorosamente assegnati, dagli anni Novanta in poi la scommessa è diventata portare i robot dentro le case, condividendo...