Learning from Nature: A Review on Biological Gripping Principles and Their Application to Robotics
J. Winand1, *, T. H. Buscher1, S.N. Gorb1 1 Department of Functional Morphology and Biomechanics, Zoological Institute of the University of Kiel, Am Botanischen Garten 1–9, D-24118 Kiel, Germany
Abstract
The process of biological evolution has resulted in a wide variety of forms, functions and strategies and this has led to distinct optimization of certain traits in organisms. Technical adoption of some “inventions of nature” might be highly beneficial for innovative developments in materials science and engineering through biomimetic studies. One prominent field of biomimetic research is related to prehension and manipulation mechanisms in robotics since these tasks are just as ubiquitous in technical environments as they are in nature. Biological end effectors with purposes ranging from simple locomotion, mating and prey catching up to delicate object manipulation have been realized there, with innumerable, sometimes subtle variants of structure and properties between them. Even though there is some coarse biological classification of biological gripping devices, the latter represent certain core principles, which evolved convergently due to the underlying basic physical phenomena. This chapter aims to categorize the most common physical principles, their advantages and shortcomings, and present a range of biological examples. Furthermore, possible transfers of functional principles from biological systems into technical environments are discussed.
Keywords: Biomimetics, Bio-inspired technology, Bionics, Manipulation, Soft grippers.
* Corresponding Author J. Winand: Department of Functional Morphology and Biomechanics, Zoological Institute of the University of Kiel, Am Botanischen Garten 1–9, D-24118 Kiel, Germany; Tel: +49 (0)431 880-4505; E-mail: [email protected] 1. Introduction
In general, biological gripping describes the act of using one or several parts of an individual’s body to create or redirect forces in such a way that the object to be gripped forms a stable mechanical connection with it, which can then be utilized in a multitude of ways. Examples include, but are not limited to, locomotion over challenging terrain features, harvesting food or catching of prey, mating behavi-
our, nest building, and communication [1]. Given this broad applicability of the generalized act of gripping and the advantages associated with it, a staggering variety of solutions evolved in natural systems. At their most basic level, however, all of them employ a specific combination of one or more elementary physical principles, the most common of which we will briefly elucidate in Section I. In Section II, the main functional principles of gripping devices in the animal kingdom will be presented and a range of examples illustrating the variability of biological grippers and their functions will be given. Afterwards, Section III will discuss the examples shown and evaluate them as to their applicability to technical environments. In addition, an overview with regard to the degree of implementation and state of the art in the biomimetic world will be provided.
2. SECTION I – PHYSICAL PRINCIPLES
As diverse and seemingly unrelated biological gripping mechanisms might seem at times, they make use of a relatively small number of physical phenomena, all of which relate to the forces contributing to contact formation between two different objects [2].
The first one of these principles is friction. When two surfaces mechanically interact in sliding contact, a force opposing the direction of motion is friction. While this is universally true for any matter (including gases and fluids), the term friction is usually used for the solid-solid aspect of the phenomenon, which is also by far the most relevant part with respect to gripping. Friction, at its very core, is rooted in the quantum mechanical Pauli Exclusion Principle, which, strongly simplified, states that no two quantum-mechanical systems may share a complete set of identical quantum numbers in the same spatial locus. This has huge implications, but with respect to the scope of this review, the most important consequence is that no two atoms may interpenetrate into each other – and by extension, neither may solid bodies. This is the elementary reason for mechanical interaction even being possible in the first place, but it also gives rise to friction. Even a hypothetical, ideally flat solid surface consists of atoms, each of which possesses an approximately spherical zone of influence, i.e., a zone of impenetrable exclusion. This actually makes it non-planar and assigns a certain “roughness” to it, in the form of ordered, hemispherically shaped exclusion zones. If this surface comes into spatial contact with another identical solid surface, there would still be mechanical obstruction of any parallel movement because those zones need to glide over one another, having to avoid each other at the same time. Furthermore, in any realistic approximation, there is no such thing as a perfectly flat solid surface, which means that different regimes of roughness ranging from the nano-scale up to macroscopic surface structures contribute to the generation of friction. The main mode of friction that needs to be considered for the purpose of this review is static friction, which describes the force with which a solid body resists lateral movement on a substrate without prior relative movement, in contrast to dynamic/kinetic friction, which describes the resistance to continuous relative movement [3]. Naturally, friction occurring for extended durations requires a closing force between both surfaces, which is called normal or load force. In many cases, this is provided simply by the Earth’s gravitational acceleration but may also be provided by any kind of mechanical actuator, for example, musculature, as exemplified in many biological gripping devices. Static friction plays at the very least a minor role in all attempts at prehending an object and reliably forming a mechanical connection with it. In many cases, static friction is the main principle behind accomplishing that task – one of the most prominent examples would be any kind of clamp gripper (e.g [4].) which works by exerting a clamping pressure on an object from opposing sides.
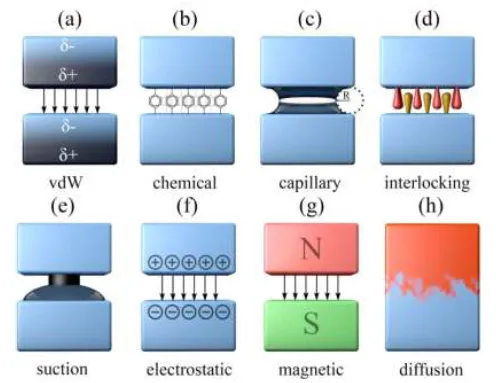
Apart from friction, whose influence is near-universal, there are several important core principles that are repeatedly utilized for gripping (Fig. 1). All of them create either a dynamic closing force or a static resistance to separation in the interface and can be found with varying prominence in the biological realm [5].
Fig. (1)) Summary of interface interactions.
(a) Van-der-Waals interactions: Closing force due to electrostatic interaction between dipoles.
(b) Chemical bonding: Resistance against separation either by direct chemical reactions between surfaces, forming stable chemical bonds, or mediated bonding by any type of curable adhesive, for example glues.
(c) Capillary Force: Closing force due to differences in surface energy, generally mediated by fluids.
(d) Mechanical Interlocking: Resistance against separation by mechanical obstruction, generally mediated by dedicated surface structures.
(e) Suction Forces: Closing force due to pressure differentials.
(f) Electrostatic interaction: Closing force due to interaction between charged surfaces.
(g) Magnetic interaction: Closing force due to mass interactions between electron spins.
(h) Diffusion: Resistance against separation due to interpenetration of polymeric chains. From [
5] with permission of Wiley & Sons.
Van-der-Waals forces are omnipresent. It is a summarizing term for different kinds of electrostatic interactions between dynamic and static dipoles found in atoms and molecules. Although individually weak, they can contribute a significant portion of the adhesive force to any gripping procedure if the surfa...